This blog contains a brief summary, supported where given permission from the author by papers and presentations to allow the further dissemination of the brilliant work presented.
Workshops
Workshop: Methods of ACI (RM4ACI)
Organisers: Anna Zamansky and Amanda Roshier
Workshop: Don’t cut to the chase: Hunting experience for Zoo Animals and Visitors
Organisers: Fiona French, Mark Kingston-Jones, Mark Campbell, Sarah Webber, Heli Vaataja and David Schaller
Vimo Video: Big Cat Hunting Enrichment at ZooJam 2016
Vimo Video: Enrichment for sea lions at ZooJam 2016
Paper Presentations
Search and Rescue: Dog and Handler Collaboration Through Wearable and Mobile Interfaces
Clint Zeagler, Ceara Byrne, Giancarlo Valentin, Larry Freil, Eric Kidder, James Crough, Thad Starner and Melody Jackson.
Zeagler and Byrne gave their presentation on thinking how a dog and human interact by suggesting that they could map a device for humans to check on a dogs location with vests using Nelsons Heurists. This technology could be used by users of search and rescue dogs to find and record the location of the search and rescue dog quickly. They presented an app and spoke about the work they had undertaken with end-users to iteratively continually design their system. Such requirements that came out of these discussions, were around waterproofing the device to allow for dogs swimming, making padding for the vest that the dogs wore and making the vest bright to allow hunters to see the dog.
The Impact of Training Approaches on Experimental Set up and Design of Wearable Vibrotactiles for Hunting Dogs
Ann Morrison, Rune Heide Moller, Cristina Manresa-Yee and Neda Eshraghi
Morrison presented an interesting presentation about creating vibrotactiles for hunting dogs brought on from requirements she faced with her own experiences with her dog. She agreed with others in the field, that this was collaborative work, similar to how she hunts with her dog in collaboration. She presented her initial studies of testing a vibrotactile vests with the dog giving a signal and then choosing the direction based off this vibrating signal. Questions were asked to Morrison about if she insured that the owner, or person within the study, gave any meta clues to the dog on the choice. This is because dogs have been shown to follow human given cues in tasks (e.g. gaze and hand gestures). Morrison said that she records all the interaction to check but also make sure that the person involved within the study does not give any clues.
Canine Computer Interaction: Towards Designing a Touchscreen Interface for Working Dogs
Clint Zeagler, Jay Zuerndorfer, Andrea Lau, Larry Freil, Scott Gilliland, Thad Starner, Melody Jackson
Zeagler presented his work on creating a nose touch screen alert system for dogs where they had to nose-swipe two dots for a successful activation. This was based upon exploration of assessing Fitts Law within Dog Computer Interaction (DCI). This work reminded me initially of Charlotte Robinsons early work on alert interfaces where she used a tug toy system. The talk also spoke about different training mechanisms used by Zeagler to train the dog to use the system for the most effective method, such as back-training. Zeagler presented basic guidelines to the ACI community on the distance needed between two interactive dots to enable successful activation interaction. he also put forward the next step of presenting a system, from these findings, which a dogs nose could swipe to call emergency services. Questions were asked to Zeagler about if the dog size influenced the gap requirement between the two dots. He stated that similarly to my work, the screen was places at dogs head height but he was sure this size would change dependable on the dogs size ability to swipe (e.g. smaller dogs smaller space between the two dots). Suggestions where also put forward of create a database for animal factors similar to human factors. Lastly, questions were also asked about why Zeagler chose Fitts law to measure within DCI and if there are any other measurements other than Fitts law. Zeagler then spoke about physical form factors which can lead to usability factors.
Sound to your Objects: A Novel Design Approach to Evaluate Orangutans’ Interest in Sound-based Stimuli
Patricia Pons, Marus Carter and Javier Jaen
Pons gave a presentation about her exploration with Orangutans and creating a ball that plays different programmable sounds on the balls movement tracked using a Kinect Depth sensor. She presented her initial findings about how this ball was used. Pons found that due to the Kinect being placed against the bars of the cage as a sensor the Orangutan instead tried to destroy the unfamiliar object with often the Orangutan being too far away from the Kinect sensor. Questions were asked of Pons about if she could instrument the ball itself so that the sound could be made directly from the object and problems would not be faced over the distance with the Kinect sensor. Pons stated that whilst this would be the ideal scenario due to welfare regulations it is not possible to introduce new technology into the enclosure and instead her method was a way of further enriching the already available toys.
Exploring Methods for Interaction Design with Animals: a Case Study with Valli
Fiona French, Clara Mancini and Helen Sharp
French presented her work that she had undertaken with Elephant users at the zoo for developing guidelines for Elephant ACI. French spoke about how she had made frames for the elephants to use, with each study giving more information about what the Elephants can interaction with and what devices as feasible. French was particularly interested in the aesthetics and looked at vibrating motors as a feedback interface to the Elephants trunk touch. She then spoke about using different materials within the device as they have different smells. French also investigated an automatic hose device and found that whilst initially elephants did not like this device (she presented a video of the Elephant running away) once the Elephant was wet they would not run from this device. As such, this requirement formed part of usability of Elephant ACI systems. French was also interested in acoustics stimulation and planned to explore this further. Questions were asked of French about how she came up with the sounds for the acoustic device and why French used treats to get the Elephants to initially use the device as this encourages the Elephant to use the device.
Towards Multispecies Interaction Environments: Extending Accessibility to Canine Users
Clara Mancini, Sha Li, Grainne O’Connor, Jose Valencia, Duncan Edwards and Helen McCain ****
Mancini presented her work on supporting assistance dogs and how to extend the accessibility of ACI systems to dog users. Mancini firstly spoke about the role that dogs play within society and how their jobs are often not made any easier by the systems that they use. She stated two main issues; firstly that assistant dogs often work under conditions that humans use so are inappropriate and secondly performance issues. Her talk began to look at creating buttons for an assistance dog to allow it to assist its owner more efficiently with a dog-designed system. An example of a system that an assistance dog user that Mancini looked at was opening doors and turning on lights. She created two buttons, one blue and one yellow, to do these two tasks. This was undertaken over an ethnographic study to look at the controls that dogs have to operator. Mancini found that dogs did not like certain material, such as ones that they could not do with their snout comfortably and could become confusing interface to use. She stated that she used colours that the dog could distinguish clearly and explore whether sounds should be included within the device to provide the user a sense of being aware of the design both sensory and cognitively. Through this Mancini found that some devices were easier to engage with and that mapping is not always something a dog can do within a system like a human can. She then split the usefulness of dogs mapping into three things; symbols (that you can teach a dog), icons (recognised representations) and indexes (associative learning). Mancini then spoke about that if a dog was unable to perceive an element of it then it can not make sense of the device, however through consistency a dog is able to make sense of the device. She suggested that the more an object behaved as an index the more trustworthy the device became through affordance and feedback which became important factors in ACI. Mancini stated that whilst dogs are unable to understanding mapping and constraints they are able to understand perceivability, consistence, affordance and feedback with these things being arguable more towards a dogs own affordances. Mancini expressed that this is just her hypothesis of how these principals might be more relevant. Questions were asked of Mancini about co-evolving within this user case study, where she stated that she does not know what the meaning might be for the dog by indexical and symbolitc learning does occur. The model she presented is a conceptual model but it provides the way of reasoning towards affordance. In this way the principals presented within this study are more important towards animals where ACI researchers should be asking why certain principals are occurring.
Plant-Computer Interaction, Beauty and Dissemination
Fredrik Aspling, Jinyi Wang and Oskar Juhlin
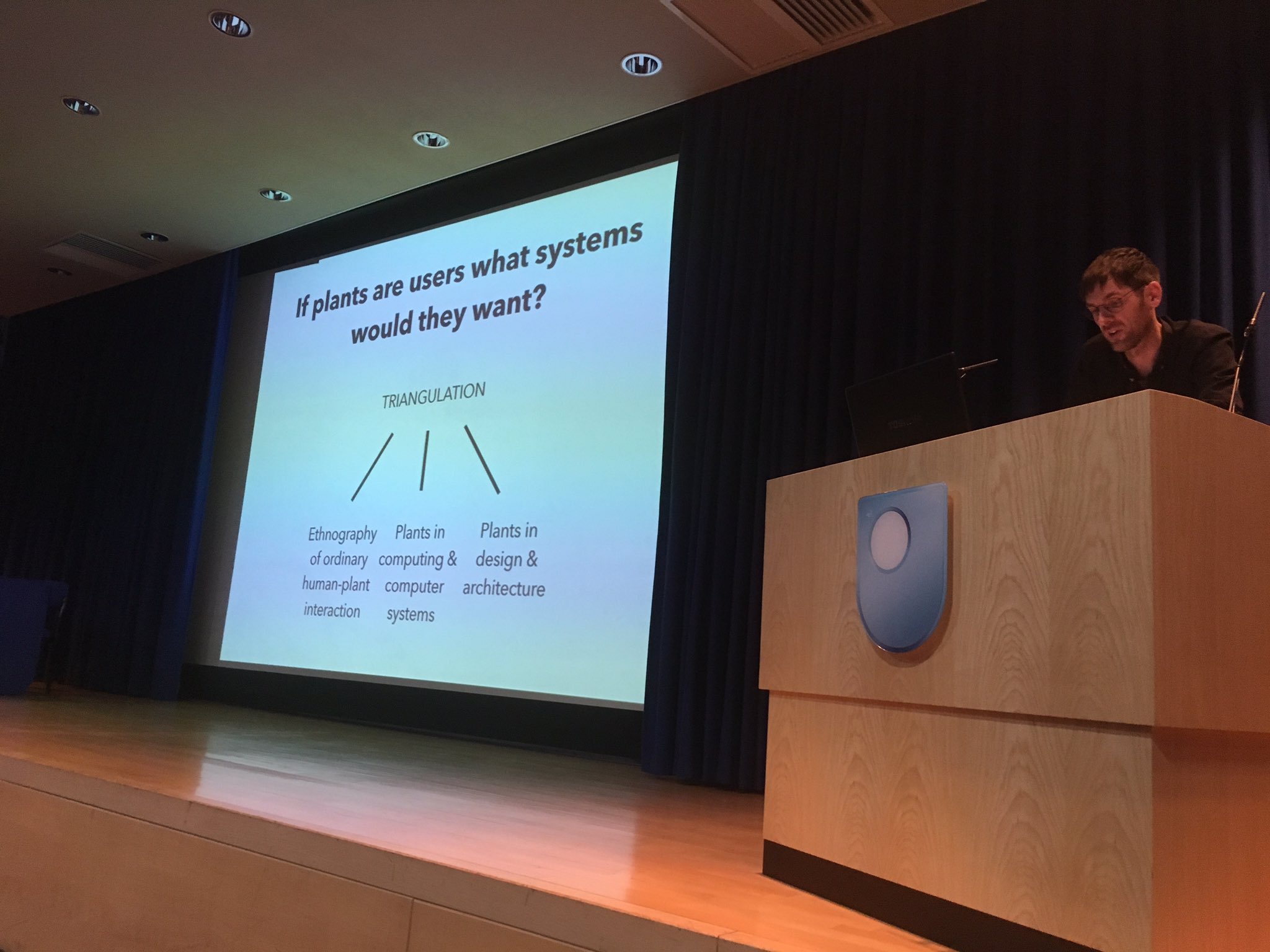
Aspling gave a really interesting talk about ACI within the realm of plants and beauty. Apsling stated that plants are often seen as the mute and immobile bit of the world passing by and nearly their as an object, however he argued for systems within ACI for them. He suggested that Plants have some sort of intelligence but perhaps more in an alien manner where they have been seen to interact with the environment and solve different sorts of problems such as sensing water, ability to learn etc. all without a brain. He then suggested that we can also turn to biology to look at this phenomenon where every subject is an object and every object is a subject often through unaware interactions. An example of this interaction he gave was where humans are just like bees where they are being used by plants for dissemination. His work questions that if plants are users within ACI systems what would they want. He put forward that could be done by an ethnography of ordinary human-plant interaction, plants in computer systems and also looking at plants in design and architecture. I personally really enjoyed this work as it was on the fringes of what I would consider ACI. In this work, he proposed to move more into the realm of looking at plants as input devices, biometric systems and nurturing systems, where he thinks he will assess plants natural ability as biosensors.
Becoming With: Towards the Inclusion of Animals as Participants in Design Processes
Michelle Westerlaken and Stefano Gualeni
Westerlaken gave her talk focusing around how to include animals within ACI as participants including theoretical notions from areas like posthumanism and critical animal studies. She focused this around Haraway’s concept of ‘becoming with‘ an animal and how you can invite animals to become a participant within the design process through exploring playful encounters. She spoke about how situated knowledges are generated from these studies and can transform and inspire designer to offer up alternatives to the ACI community. Westerlaken then presented some user studies she had conducted with her own two dogs on textures on moving balls to open up the design space in ACI. Questions were asked to Westerlaken about if she believes that participatory design applies to animals, to which she answered that she does not care so much about our human tendency to try and force-fit human-centred terminology and methods to design with animals. She rather proposes to explore what design methods do work with animals and try to develop frameworks and theoretical notions around those. This then opened into a talk about recommendations that Westerlaken could give to the ACI community for the future and how she could quantify good and bad. Westerlaken answered that she thinks that design practice often arises out of intuition and creative efforts that are not easily turned into design principles within the broad field of ACI. While the community appreciated this exploratory effort suggestions were made to Westerlaken to start quantifying this usage, by stating that our major issues and the essence of measuring welfare arise from these challenges.
Unleashed Enthusiasm: Ethical Reflections on Harms, Benefits, and Animal-Centered Aims of ACI
Katherine Grillaert and Samuel Camenzind
This talk, given by Grillaert, spoke about the ethical reflections on the harms, benefits and animal-centric aims of ACI, through Grillaert reflecting on the ethical position of work undertaken within this field. Her talk focused mostly on the conflicts that ACI technology faces in the non-speciest approach advocated on the ACI blog that suggested within ACI we should treat animals as individuals according to his or her own needs. Within her talk she also mentioned that if technology is truly an ACI ‘thing’ then we should use the animals for non-work. She then spoke further into these conflicts by speaking about motivation tests where an animal is tested to see how much work it would do (e.g. weight lifted) to get to an item. She questioned if this was ethical, and could these responses be comparable between say a human and a cat. Grillaert also noted that there is a potential to increase fear through technology being introduced and then taken away. Lastly Grillaert spoke about how from her perspective of ACI there are areas within the methodology that could be improved, such as last of data freely available in ACI. Questions were asked to Grillaert about if she saw ACI contributing to new ways of assessing to animal welfare, which she did and noted the potential.
Doctoral Consortium
Integrative Multimodal Play for Elephants
French looked for gap in the experience between captive and wild elephants to help build enriching interfaces for captive elephants. With a majority of her work looking at a singular elephant named Valli held in a buddest temple in wales, French looked into the missing requirements that Valli needed and was missing within her captive environment. Whilst she initially thought of a calling game to enable elephants to remotely speak (there were jokes from the audience made about an elephone!), French decided upon moving away from this initial idea into exploring toys. She has begun to explore using different textiles and is looking into exploring acoustics and haptics for the elephant. Questions asked to French were around who she was designing for, with the community feeling that it is OK to design for one elephant but then re-purpose things in another context for another user. Another question was about the terminology ‘showing interest’ and what does this mean within ACI systems. French answered that this is currently done through both Zoo Keepers and video footage analysis with the suggestion of measuring time in classifying these behaviours to give more qualitative data. Lastly questions were asked from a behaviourist about why French was trying to mimic a biological need as it can never be met or mimicked as she is not an elephant where the behaviourist suggested that instead play should be used as a primary enforcer.
Designing for the Other: Views on Selves, Playfulness, Multispecies Philosophy
Westerlaken presented her PhD work focusing around her ideology approach to ACI calling for a more critical approach to designing for and with animals. Her research focuses on the practice of “doing multispecies philosophy” through the design of playful artefacts with animals, with the aim to rethink anthropocentric practices that oppress and exploit animals. Suggestions were given here by her mentor on suggesting that first she formulates a theory about ACI and then find a methodological approach by starting with technology. This would allow an improved developed methodology in articulating the interaction. The audience also suggested using dogs as there had been a strong history of exploration and would not conflict with Westerlakens ethical values. Dogs are also inherent at co-operation with dogs and humans often exhibiting already a level of play which Westerlaken can build from.
Enabling Embodied Interactions in Playful Environments
Pons PhD work has so far centred around modelling animals within computer systems for automatic recognition, mostly focused around cats but also testing on Orangutans and big cats. Pons aimed to have a fully working system that could recognise body language. Queries were given to Pons about fears the community had on the body positions being recognised being individualistic. Pons felt that the recognition of body language context could be done through gathering information from the animal device itself.
Biometric Interfaces for Dogs
Byrnes PhD is interested in looking at sensors to see which one for dogs is more effective. She sees her work as an interdisciplinary approach to push knowledge held within the field back into other field to create a more combined shared foundation. Questions asked to Ceara were about the huge scope of her work, and by perhaps scaling it down would help her further define her goals.
Designing for Wearability in Animal Biotelemetry
Paci looks at developing frameworks and measurements to help develop animal biotelemetry tools for animal monitoring and welfare instances. She is interested in wearability of this device, as these devices can bias the normal behaviour when unsuitable. Paci is also interested in requirement gathering in a wearer centred framework. Questions were asked from the audience about where she was building up the framework from. Paci is building up the analysis from guidelines that began in animal welfare and from this iterating into practice to refine the framework built. In this way the framework informs the prototype.
Creating Meaningful Interactions with Dogs and Screens
Ilyena Hirskyj-Douglas || Download Presentation
Hirskyj-Douglas presented her current PhD work within various studies and theories about a dog’s interaction with screen devices and how best to support these practices. She spoke about her research goals and current studies from the conception of looking at what media a dog enjoys watching to tracking a dogs’ vision across multiple screens. Questions were asked to Hirskyj-Douglas about how she measured a dogs’ gaze, which she answered through video analysis and researchers’ judgement. The community also spoke about how within dogs’ vision there is such variability among breeds and this might have an impact upon the findings which Hirskyj-Douglas acknowledged and spoke about how breed pairing in studies can prevent this variability. An audience member also asked Hirskyj-Douglas about if she monitors the owners to which she answered that she tells the owner not to watch the screen to ensure that a dog is not following the humans vision and that the human is told not to encourage the watching behaviour. The audience felt that Hirskyj-Douglas work had great potential for enrichment projects in the future. A comment was also made about Hirskyj-Douglas work being more ethnographic than participatory as it seeks to understand dogs within an ordinary environment. From this discussion a conversation ensued about the definitions of training and what is training within ACI systems.
Extended Abstracts
Training Collar-sensed Gestures for Canine Communication
Joelle Alcaidinho, Giancarlo Valentin, Gregory Abowd and Melody Jackson.
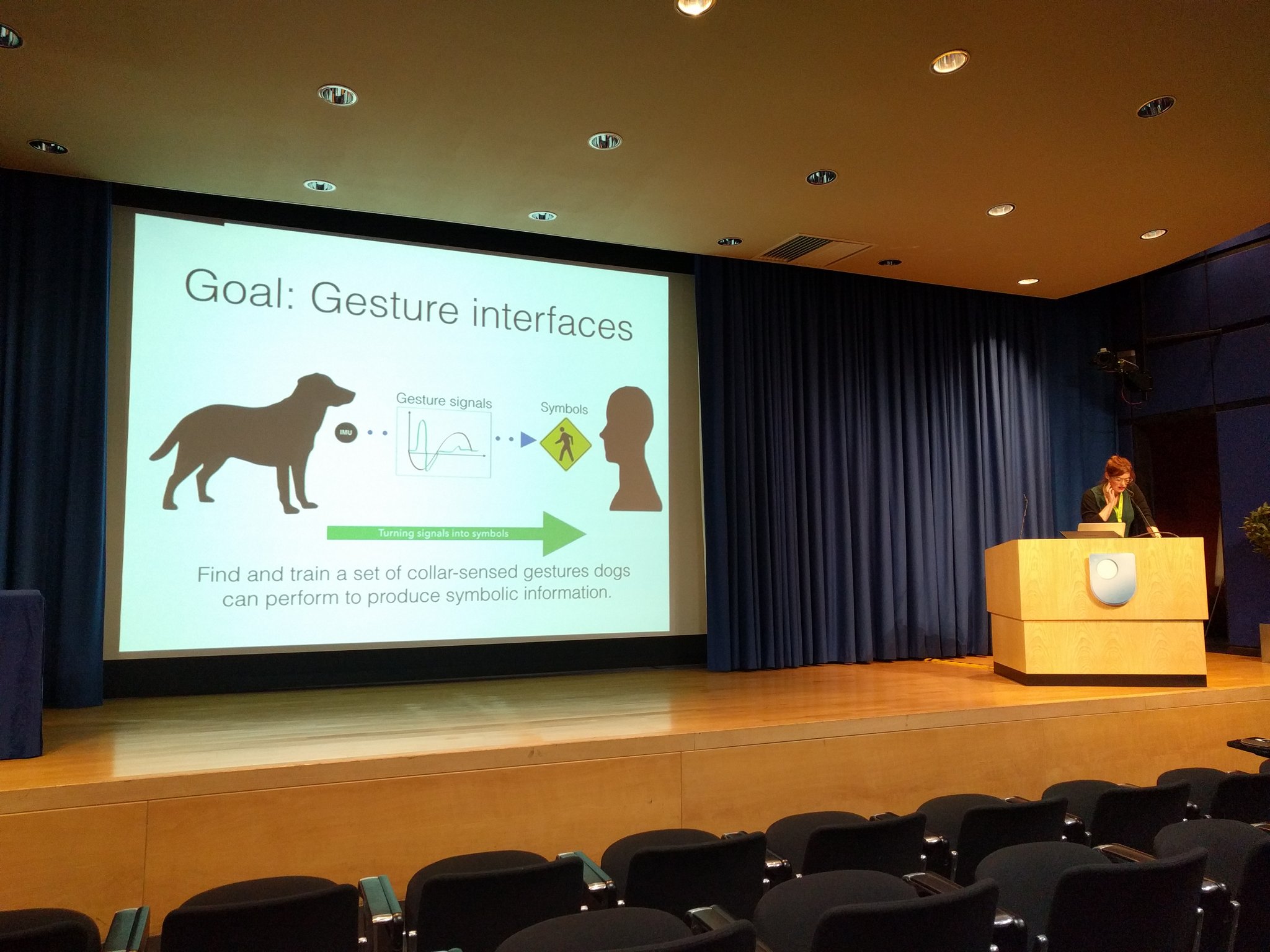 Alcaidinho presented her work about how to train dogs for gestures and showed initially that dogs are able to follow gestures on cue, such as pulling on a tug system. This work was centred around research of a vest which dogs are able to use to alert people, such as search and rescue of a lost child. A system like this could be activated by a dog to enable the rescuer to know the persons location whilst enabling the dog to continually follow the person. So far this system design put forward the idea that different dogs require different activation systems, one was under the dogs chin attached to his chest, whilst the other was on the side, dependable on the dog, owner and environment. Another requirement that came from this study was the importance of working with the dogs and people involved in this system to help build up requirement sets. Lastly, the device also had to give an activation to the dog so that the dog had a form of feedback that the device had been activated to prevent the dog from continually trying to activate the device.
Alcaidinho presented her work about how to train dogs for gestures and showed initially that dogs are able to follow gestures on cue, such as pulling on a tug system. This work was centred around research of a vest which dogs are able to use to alert people, such as search and rescue of a lost child. A system like this could be activated by a dog to enable the rescuer to know the persons location whilst enabling the dog to continually follow the person. So far this system design put forward the idea that different dogs require different activation systems, one was under the dogs chin attached to his chest, whilst the other was on the side, dependable on the dog, owner and environment. Another requirement that came from this study was the importance of working with the dogs and people involved in this system to help build up requirement sets. Lastly, the device also had to give an activation to the dog so that the dog had a form of feedback that the device had been activated to prevent the dog from continually trying to activate the device.
Semi-Supervised Classification of Static Canine Postures Using the Microsoft Kinect
Sean Mealin, Ignacio X Domiguez and David L Robberts
Mealin presented his work, which bared resemblance to Pratrica Pons work, on using Microsoft Kinect as a depth Sensor. In this, he was looking at creating a device that recognising a dogs different postures allowing for posture recognition without emphasis on wearable technology. He presented his work he had done so far with a few dogs, through very small classifications, that his system was able to recognise if a dog was sitting down. Questions were asked of Mealin to see if there are certain dogs that it was easier to identify body position, and he spoke about a dog with a curly tail tight to its back being harder to track as it is not atypical dog body. He then spoke about how the depth images tells what position the dog is in by using depth data to provide labels.
Designing for Wearability in Animal Biotelemetry
Patrizia Paci, Clara Mancini and Blaine Price

Paci described in her talk the work she has currently undertaken on the usability of cats and collars. She created an ethogram of behaviours to map the we arability of the technology through a model created itterativly as her work progresses. Questions were asked about if this work followed Grounded Theory (GTM) principals but the community felt instead this was more ethogram.
Exploring Human Perceptions of Dog-Tablet Playful Interactions
Anna Zamansky, Sofya Baskin and Vitaliya Kononova
Zamansky presented her work on perceptions of dog tablet interactions which she spoke about humans judging dog interaction into good and bad interactions based upon videos of dog behaviour.
A Dog Using Skype
Alexandre Pongracz Rossi and Sarah Michelle Rodriguez
Rossi presented his system where he had trained his dog to react to commands given over Skype. If the commands were followed by the dog a 3D printed device that he had made, would then dispense treats to the dog. This work was controversial, to myself at least, as I felt at times that this was the circus act side of ACI where the only benefit of this system was for the humans entertainment.
Dog-Drone Interaction: Towards an ACI Perspective
Anna Zamansky
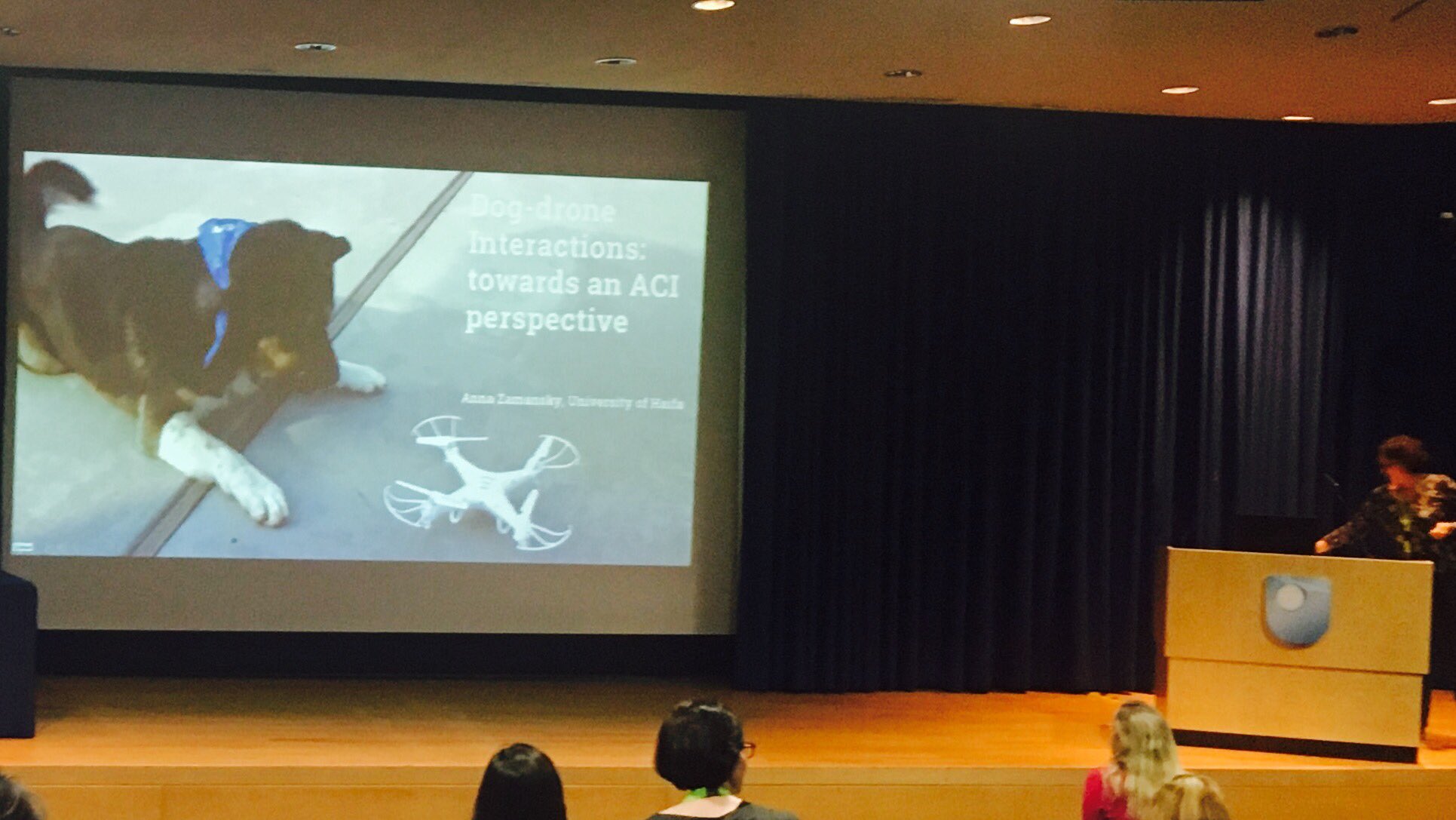
Zamansky presented her work on investigating dog-drone interaction and questioned if there is a safe way to create dog-drone interaction as this often can be precarious. Examples were given about how dogs use drone devices with videos shown of dogs actively destroying drone devices used.
Aquarium Fish Talks about Its Mind for Breeding Support.
Naohiro Isokawa, Yuuki Nishiyama, Tadashi Okoshi, Jin Nakazawa, Kazunori Takashio and Hideyuki Tokuda.
Isokawa presented his work on tracking fish within a tank to give the user a message about how the fish is doing. This would give messages such as ‘I am hungry’ if they had not seen the fish doing eating movements and gave the user a better way to interaction with their fish.
De-computing the Pigeon Sensorium
John Fass and Kevin Walker
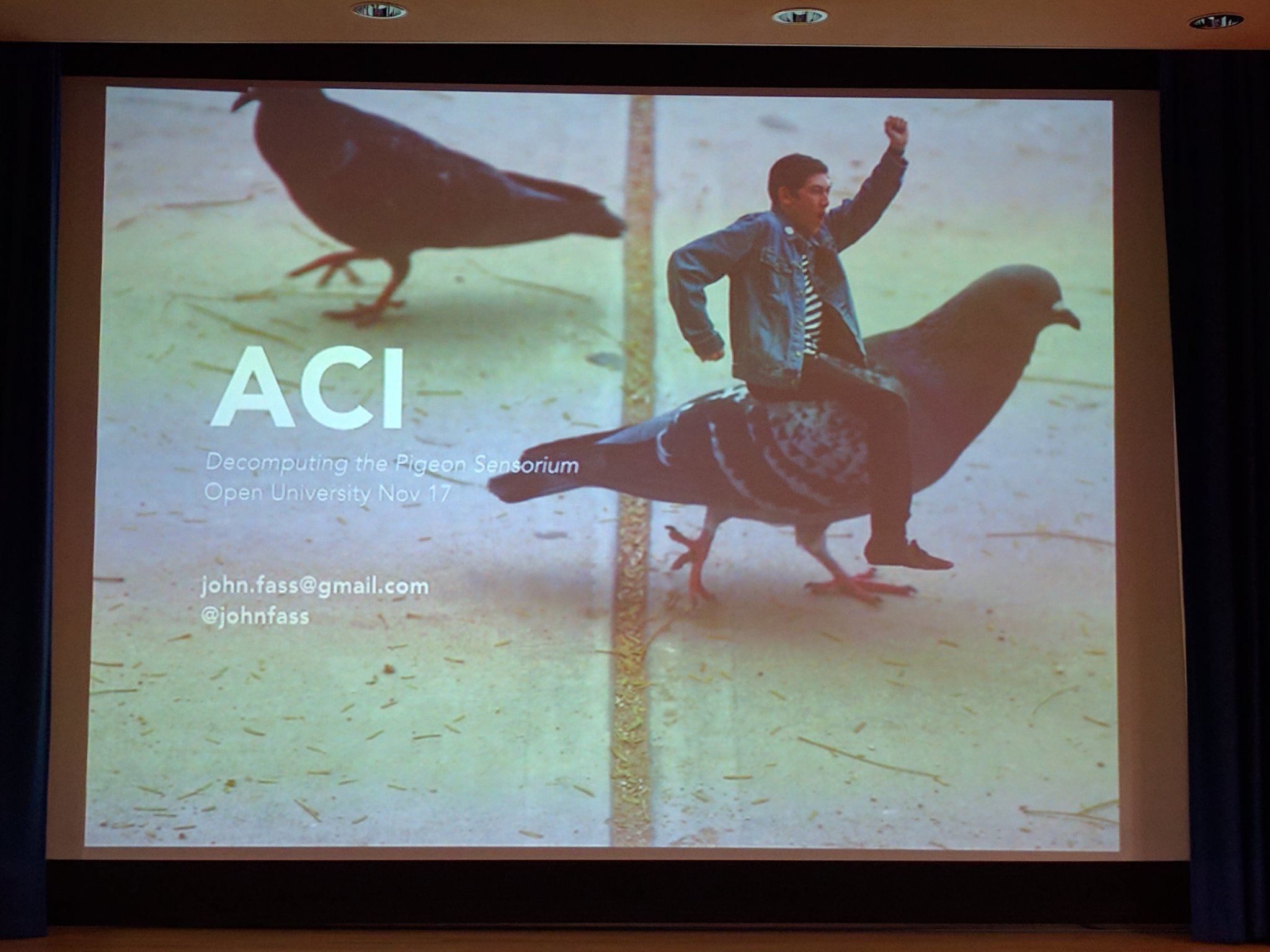
Fass presented his work that him and his students had undertaken around designing within ACI experimental and exploratory design. He mentioned that this work fit into the third paradime position between design not focusing on the mediums instead transforming data into design. This work presented different wearables to give the user the visual perception of a pigeon. This was from the notion that we might be able to draw more on the senses of animals beyond just putting tablets in front of animals.
Key Note
 Computer use by non-humans to improve their welfare?
Computer use by non-humans to improve their welfare?
David Broom
The closing keynote was given by Broom about ACI to improve welfare. In his talk Broom spoke about welfare, history of computer welfare research and environmental controls. He stated that if animals can predict what is going to happen when they are going to be better at choosing what is to happen, as natural selection would favour those that can predict. An example was given where is rats were put in situations where they could not prevent themselves getting an electric shock and did not know when this was going to happen they would get sick, and as such unpredictability in ACI can be a problem. He then spoke about measuring the strength of preference and how computers can be used in collecting information which in the long run can be used for animal welfare. He stated that in animal welfare we often used sentience where we tend to split animals into those which we care about and those which we do not, we device animals into those which have feelings and which ones that do not. In this way it affects our moral discussion over what is sentient and what is not – which ones are? What is sentience? If a person is brain damaged when does sentience case to exist? Are embryos sentience? There is clearly a time when humans are not sentient and as such do animals move through these same parallels. He then lead into questions about how to measure an animals learning, in which how you ask the question of an animal often alters what answer you get and as such you need to be careful about the questions you ask. In this manner you can never be sure if things happen because of the animal or the experimenter. The treatability of animals within ACI is important to welfare, however as a group animals behave differently. Whilst these are interesting questions Broom stated that we often do not know most of these answers, such as what is enrichment? Does the transference of enrichment transfer across to animals? He suggested this can be partially answered by looking at what animals would work for; how much would they do to get X? Broom stated that some people are worried about the level of control an animal has and what is the overall impact of this control, drawing back to predictability being an important factor in ACI.
Questions were asked to Broom around how should the welfare be focused around biological problems? To which he replied that it should be biologically focused with the adaptability of the animal and the biological function being important. This does not mean that the animal has to have a natural environment, you do not need to have an identical environment to nature instead focus on giving the animal what they need. For instance most animals kept within the wild we have a lot of information, so because of this we can use that information when keeping the animal in captivity. This can often be harder in Zoos as we often do not know this information, in many cases we do not know enough. In some cases these are not solvable problems. In this instance knowing about biological function is important but mimicking their natural environment is not.
Questions were also asked of Broom around where is greater agency in ACI and have we as a community been skirting around this? Broom stated that if we are trying in ACI to improve animal welfare the best animals to work with are those with the biggest problem, such as chickens. Broom felt this was the biggest problems are those which are present in the largest numbers with the biggest amount of problems. Most of ACI current work has been done with pets and zoo animals however maybe there should be more of a focus on farm animals.
Lastly, questions were asked of Broom of the future of Zoos to which he said that consumers often control the outcome of zoos through their opinion of zoos which has recently changed with a more general awareness of animal welfare.
Overall ACI2016 was a lovely experience pulling a multitude of researchers across the world, both from computing, engineering, design, and animal behaviour to create a multidisciplinary conference. Whilst this conference had a more animal behaviourist feel to it than the previous two years (1st and 2nd) this did show both the development of the community and the increased awareness of a need to merge the ACI field into more disciplines other than computing and engineering.
